
Автоматическая система перестыковки (станция «Мир»)
Автомати́ческая систе́ма перестыко́вки (АСПр) — система в составе орбитальной станции «Мир», предназначенная для перестыковки целевых модулей, которые причаливали к центральному узлу переходного отсека базового блока, на боковые стыковочные узлы. В англоязычной литературе также встречаются написания англ. Lyappa или англ. Ljappa.
Назначение АСПр

Базовый блок, с которого началось строительство станции «Мир», был выведен на орбиту 20 февраля 1986 года. В его состав входили: рабочий отсек, предназначенный для жизни и работы экипажа; агрегатный отсек с переходной камерой и пассивным стыковочным узлом, к которому могли причаливать как пилотируемые и грузовые корабли, так и целевые модули дооснащения с активным стыковочным узлом; переходной отсек, оборудованный пятью стыковочными узлами (один по оси станции и четыре боковых). Переходной отсек, помимо стыковочных функций, выполнял функции шлюзовой камеры для подготовки экипажа к внекорабельной деятельности[1].
Причаливание космического корабля или целевого модуля могло производиться только к осевым стыковочным узлам. После стыковки с переходным отсеком модуль перемещался с осевого узла на один из боковых с помощью специального манипулятора. Эта система получила название «Автоматическая система перестыковки» (АСПр). Та же система использовалась для переноса модулей с одного бокового узла на другой, через центральный[2][3].
Принципиально новым элементом в этой операции стал манипулятор–перестыковщик. Иногда мы называли его просто «лапа», что было понятнее. Эта электромеханическая рука, короткая и мощная, действительно чем-то напоминала лапу сибирского медведя, отсюда и её название.В. С. Сыромятников[4]
В зарубежной литературе манипулятор автоматической системы перестыковки и саму систему называют англ. Lyappa или англ. Ljappa[5][6]. То же название применяется и к системе перестыковки модулей китайской космической станции[7].
Описание АСПр


Манипулятор, который перемещал целевой модуль с центрального стыковочного узла на боковой, устанавливался на самом целевом модуле. Каждый из модулей, начиная с «Квант-2», был оснащён собственным манипулятором. После стыковки модуля с осевым узлом, головка манипулятора входила в зацепление с одним из двух гнёзд на переходном отсеке, расположенных между боковыми стыковочными узлами. Манипулятор ещё на Земле устанавливался на модуле с левой или правой стороны — в зависимости от того, на какой узел должна была производиться перестыковка. Управление перестыковкой осуществлялось в автоматическом режиме средствами модуля. При необходимости, операторское управление процессом перестыковки могло осуществляться и из ЦУП. Переходной отсек станции при перестыковке, как и при стыковке, был пассивной частью системы[4]. Манипулятор имел два шарнира, работающие в разных плоскостях: один шарнир отводил модуль от осевого узла и подводил к боковому, а второй — поворачивал к нужному боковому узлу[8].
Главной сложностью при создании системы была необходимость перемещать двадцатитонный модуль относительно базового блока с приблизительно равной массой. Скорости перемещения были выбраны небольшими и были предприняты меры для демпфирования и гашения возникающих инерционных сил и колебаний. Процесс перестыковки занимал около 60 минут и осуществлялся полностью автоматически. В конструкцию манипулятора были заложены значительные резервы по прочности и амортизирующим свойствам, которые оказались востребованы при стыковке целевых модулей «Квант-2» и последующих, имевших большие размеры и массу по сравнению с первым модулем «Квант», пристыкованным ранее со стороны агрегатного отсека[4]. Ресурс манипуляторов на каждом модуле составлял 7 перестыковок[9].
Особенностью процесса перестыковки было то, что стыковочными конусами, в которые должен входить штырь активного узла, были оборудованы только осевой и один из боковых узлов переходного отсека; остальные три боковых узла были закрыты плоскими крышками. Это решение было принято для увеличения внутреннего объёма переходного отсека, который служил также шлюзовой камерой для выхода космонавтов в открытый космос (единственной до установки модуля «Квант-2»), а также для облегчения базового блока, масса которого по итогам испытаний превышала допустимую. Перед перестыковкой космонавты должны были переустанавливать стыковочный конус на нужный узел, снимая крышку и разгерметизируя переходной отсек. Эта операция была по сути внекорабельной деятельностью, хотя космонавты не покидали пределы станции[2].
Применение АСПр
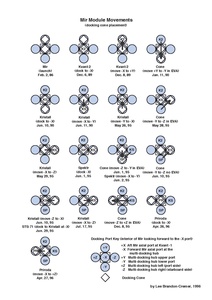
Впервые система перестыковки была использована при установке на станцию «Мир» модуля дооснащения «Квант-2». Модуль причалил к осевому узлу переходного модуля 6 декабря 1989 года и 8 декабря 1989 года был перестыкован на верхний узел («+Y»)[10]. В июне 1990 года к станции причалил и был перестыкован на нижний узел («-Y») стыковочно-технологический модуль «Кристалл»[11]. В таком состоянии, с двумя пристыкованными с противоположных сторон переходного отсека модулями, станция функционировала до мая 1995 года. В мае 1995 года модуль «Кристалл» через центральный узел был перестыкован на правый («-Z»), чтобы освободить нижний узел для модуля «Спектр». Во время этой операции манипулятор модуля совершил 2 перестыковки (с нижнего узла на центральный и с центрального на правый), между которыми космонавты произвели перенос бокового стыковочного конуса[12]. 1 июня 1995 года к станции причалил модуль «Спектр», который 2 июня был перестыкован на нижний узел[13].
Манипулятор «Спектра» был существенно доработан по сравнению с предыдущими модулями для обеспечения движения по сложной траектории, исключающей зацепление панелями солнечных батарей «Кристалла» при перестыковке. Конструкция манипулятора и логика его управления были изменены так, чтобы обеспечивать одновременное перемещение обоих шарниров в двух плоскостях[14]. 10 июня 1995 года модуль «Кристалл», оснащённый стыковочным узлом АПАС, снова был перестыкован на центральный узел, чтобы обеспечить безопасное причаливание шаттла «Атлантис» (миссия STS-71)[15]. Причаливание «Атлантиса» к «Кристаллу» на боковом узле было невозможно из-за риска повредить конструкции станции. После завершения совместного полёта модуль «Кристалл» был возвращён на правый боковой стыковочный узел. Для избежания дальнейших перестыковок для «Кристалла» был изготовлен дополнительный стыковочный отсек, обеспечивающий безопасное причаливание шаттлов при размещении на боковом стыковочном узле. Этот отсек был доставлен миссией «Атлантис» STS-74[9]. 26 апреля 1996 года к станции причалил модуль «Природа», который 27 апреля был перестыкован на левый боковой узел («+Z»)[16]. В такой конфигурации станция проработала до окончания существования. Всего модулями было выполнено 8 перестыковок, из них 5 — «Кристаллом», и по одной — каждым из трёх остальных[17].


Аналогичные системы

На китайской космической станции «Тяньгун» для перестыковки экспериментальных модулей «Вэньтянь» и «Мэнтянь» на боковые стыковочные узлы базового блока «Тяньхэ» используется система, аналогичная АСПр станции «Мир», с установленными на торцах модулей манипуляторами[18][19]. Впервые китайская «Ляппа» была применена 30 сентября 2022 года при перемещении модуля «Вэньтянь»[20]. 3 ноября 2022 года аналогичная операция была проведена с модулем «Мэнтянь», что завершило формирование Т-образной конфигурации станции[21].
Для установки на МКС модулей, доставляемых кораблями «Спейс шаттл», применялся манипулятор «Канадарм», установленный на борту шаттлов[22]. Для причаливания к американскому сегменту МКС беспилотных грузовых кораблей, не имеющих собственной системы стыковки (например, Cygnus и HTV), применяется манипулятор «Канадарм2». Он захватывает корабль и пристыковывает его к узлу CBM[23]. Так, с помощью «Канадарм2» были пристыкованы корабли Cygnus NG-18 в ноябре 2022 года[24], Cygnus NG-19 в августе 2023 года[25] и японский HTV-X1 в октябре 2025 года[26]. Корабли Dragon 2 стыкуются автономно, однако «Канадарм2» используется для извлечения полезной нагрузки из их негерметичных отсеков[27].
Аналогичная системе АСПр система перестыковки реализована на российском модуле «Причал» Международной космической станции. Он оснащён манипулятором-перестыковщиком, который позволяет в автоматическом режиме перемещать пристыкованные корабли с осевого порта на один из боковых[28][29]. 6 апреля 2023 года состоялась перестыковка корабля «Союз МС-23» к модулю «Причал», однако она была выполнена в ручном режиме экипажем корабля, а не с помощью манипулятора модуля[30][31].

Примечания
Литература
- К. Лантратов (1995). “Полёт орбитального комплекса "Мир"”. Новости космонавтики [рус.] (11).
- В. А. Гапонов, А. Б. Железняков. Станция «Мир»: от триумфа до.... — Санкт-Петербург : Система, 2006. — ISBN 5-8114-0438-07.
- В. С. Сыромятников. 100 рассказов о стыковке. Часть 2. — М. : Университетская книга Логос, 2010. — ISBN 978-5-98704-455-1.